Walking Robot - Linkages
The project aim was to design, build, and analyse a four legged walkable robot using a single geared motor and components found on campus. A four-bar linkage system was used and an image of the robot is shown below. A brief description of the design process, testing, and final design are described below.

Design Process
The link lengths were determined using a graphical method at first (to determine the rough desired lengths), and then confirmed and optimised in software (Norton Linkages). These values were adjusted and optimised again several times once constructed to allow for smoother, more fluid motion.

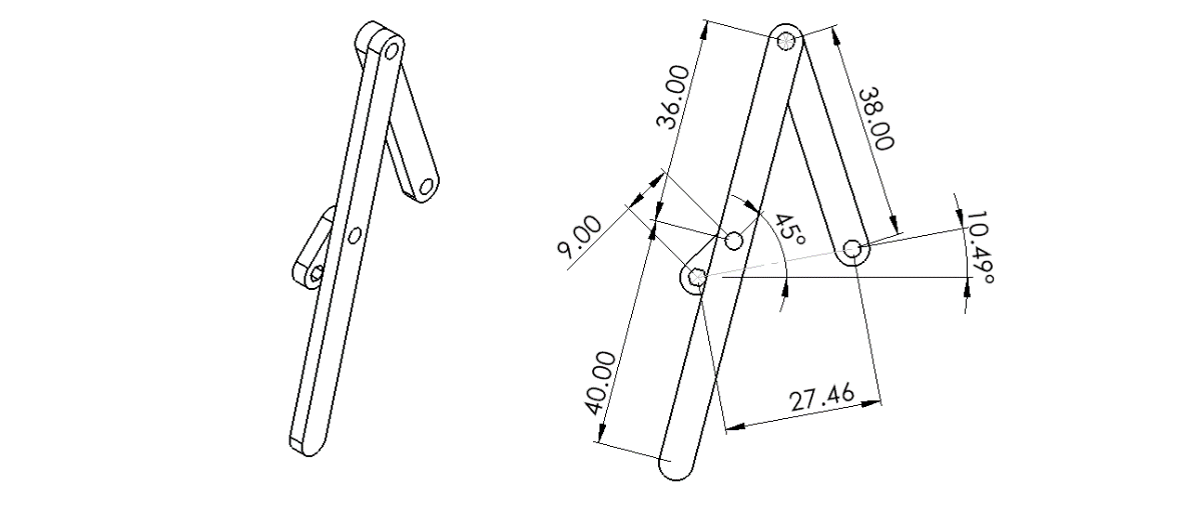
This also included a validation of the velocity of the linkages throughout the 360 degrees of movement built in MATLAB (position and torque analysis were also completed).


Preliminary testing
Several linkage lengths were explored throughout the testing process, which allowed for a greater understanding of the practical limitations of the mechanism. As a weak motor was used, issues of torque made some designs less practical, even though they may have had better velocity characteristics. As well as some cases where the vibrations were causing bearings to loosen. These issues were fixed in the final design.
This is what the lil bugger looked like before we made him pretty.

Final Design
The final design overcame the practical issues impacting the mechanism’s functionality, with solutions emphasising stability. This was achieved by applying Threadlocker on the nuts to negate tightening and loosening during movement, adding acrylic spacers ensuring the linkages had full range of motion, and adjusting link lengths for the mechanism to function within its maximum torque range of motion. The motor was mounted to the top of the shell with patterns etched into the top and side shell design.
I hope you enjoy the video of this guy waddling around :)
Asier